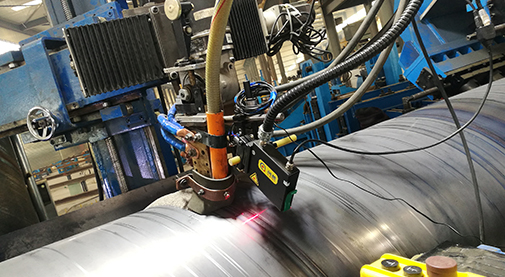
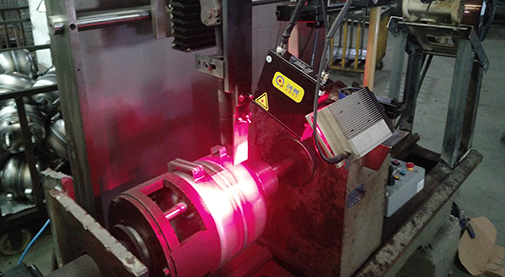
激光焊縫跟蹤器采用智能實時焊縫跟蹤技術、非接觸式跟蹤模式,通過傳感器測量焊縫偏移,引導并控制焊槍精確定位,避免因工件位置偏差造成的焊接缺陷,提高生產效率及產品質量。焊縫跟蹤傳感器使用場景較多,有些場景干涉較多,相機需要安裝的高一些避開干涉。JXB500S的安裝高度達500mm,解決現場工件高低方向干涉問題。

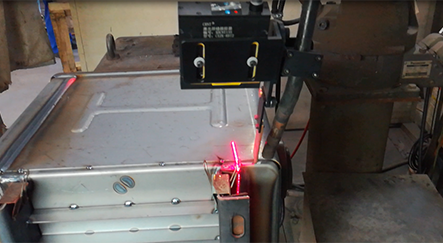
由激光器、光學傳感器和中央處理器構成,采用光學傳播與成像原理,得到激光掃描區域內各個點的位置信息,通過復雜的程序算法完成對常見焊縫的在線實時檢測。
l 可一鍵解決檢測范圍、檢測能力以及焊接過程中的常見問題;
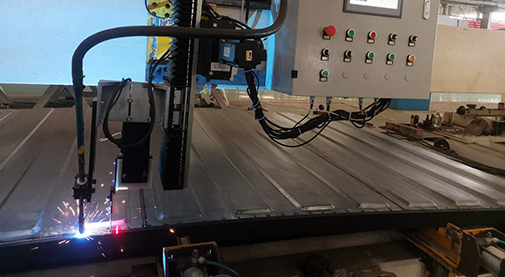
l 可實現實時糾正焊縫偏差,智能實時跟蹤,精確引導焊槍自動焊接;
l 可有效解決焊縫偏差帶來的問題,確保焊縫成型完美。
u 可支持標準的串口與網口通訊協議。
u 可與多種機器人進行通訊,解決工件夾裝偏差,組隊偏差與焊接過程中的熱型變。
u 適用于高低方向干涉較多的工件。
v 使焊槍處于理想位置,確保焊道連續,無急轉彎。
v 減少勞動成本,提高生產效率。
v 集成度高,采集單元與運算單元一體設計。
v 有更換玻璃片裝置,現場更換玻璃簡單。
v 補償生產、設備和操作公差;
v 針對復雜工件,減少編程工作;
v 實現一致的、可復現的焊接效果。
v 安裝高度高,與工件干涉小。
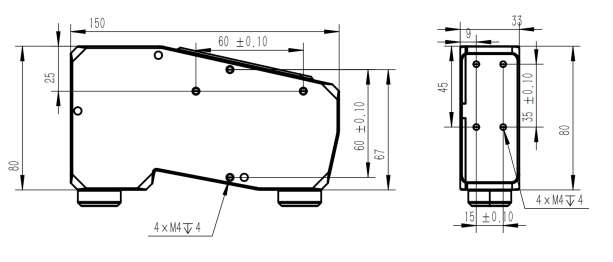
產品尺寸圖及安裝孔位:
CXZK-JXB500S-A(精度略低,視場較大)
CXZK-JXB500S-B(視場略小,精度較高)

CXZK-JXB500S-16

CXZK-JXB500S-25